



Vibration Reduction Technology
高速・高精度と
装置設計自由度を両立する
Vibration Reduction Technology
ロボット制御における課題のひとつが振動です。ロボットの動作速度に比例して強まる振動は、固定されている架台や周囲の装置にまで悪影響を及ぼす可能性があります。しかし、製造工程においてロボットの動作を速め、製造ラインでひとつの工程にかかる時間を短縮することは非常に重要な課題です。
エプソンは、自社のロボットを最大限に活かすためにVibration Reduction Technology (以下VRT) を開発しました。VRTは、ロボットの動かし方を工夫することで、架台やハンド、カメラなどの振動を抑える振動低減技術です。VRTによりロボットの動作に起因する振動を最大限低減し、低コストで自由度の高い装置設計を実現できます。
ロボットを
高速で動作させるための課題
製品の品質を保ちながら、工数ごとにかかる時間を短縮して生産性を向上させたい-そのような需要を満たすためには、ロボットを高速・高加速度で動かすことが必要です。しかし、ロボットの速度を上げれば上げるほど、駆動中に発生する振動あるいは動作停止後の残留振動が大きくなります。発生した振動はロボット本体だけでなく、ロボットを固定している架台や取り付けられているセンサー、カメラなどの振動にもつながります。
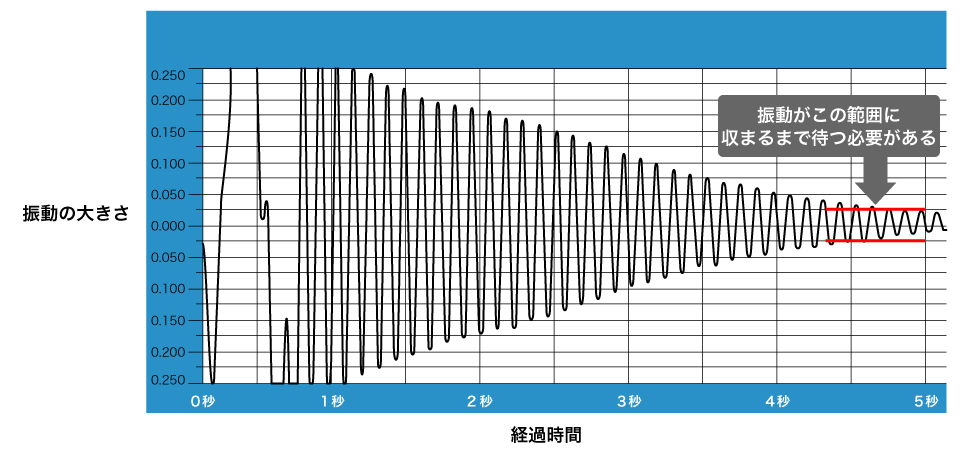
ロボット自身の残留振動を小さくしてもロボットを固定している架台の残留振動が大きければ、高速・高精度で位置決めすることは困難です。そこで、振動の影響を出さないように残留振動が収まるまで待つと、今度は工程ごとのかかる時間が長くなります。その上、センサーやカメラの振動は検出データの誤判定の可能性を高め、製品の品質悪化を招きます。
速度を維持しつつ周辺装置も含めた振動も抑え製造装置全体のパフォーマンスを最大化する、そのような技術が製造現場では求められています。
振動の低減方法と
それぞれの問題点
ロボットの振動を抑え精度を高めるためには、一般的に以下のような手法をとります。
- ロボットを低速・低加速度で動かす
- ロボットアームの剛性を高め、扱える加工対象物の質量を小さくする
- ロボットを取り付ける架台の剛性を高め、取り付けを強固にする
- 発生した振動が周りに伝わらないように緩衝材を用いる
しかし、ロボットをゆっくり動かせば発生する振動は小さくなりますが、サイクルタイムの短縮を達成できません。また、ロボットアームや架台の剛性を高める方法には、コストが大きくなる、設置場所が限られるといった障壁が存在します。
例えばロボットをフレームに吊り下げて使用する場合は、通常、剛性の高い鉄フレームの溶接架台を用いることで、発生する振動を許容レベルに抑えていました。しかし、鉄フレームの溶接架台には、作成するのにコストや時間がかかり、高さの変更もできないため汎用性が低いという問題点があります。一方、加工の容易なアルミフレーム架台を使った場合、素材の剛性が低く固定部も弱いため、ロボット稼働時の残留振動の収束に時間がかかりました。最後の緩衝材を用いる方法も、スペース効率という観点からは最適な選択肢とはいえませんでした。
VRT導入によるさまざまなメリット
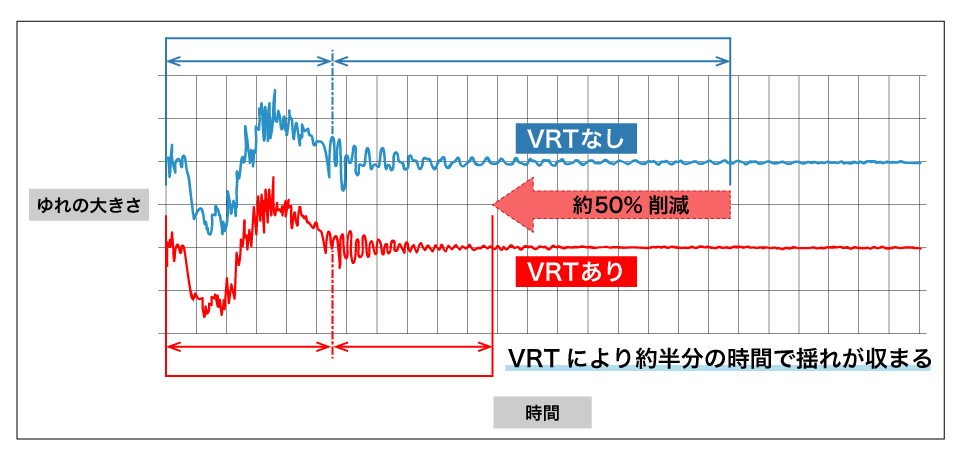
VRTは、架台やハンド、カメラなどの特性に合わせてロボットの動かし方を工夫することで、架台などの振動を抑える振動低減技術です。特に振動の大きいロボットをフレームに吊り下げて使用する場合では、優れた効果を発揮します。VRTの導入前に比べて振動が約10分の1まで低減した事例もありました。
VRTのメリット
- ロボットの振動を抑え、高速・高精度の動作を可能にする
- 残留振動収束のための待機時間を大幅に短縮しサイクルタイムの低減に貢献する
- コストを抑えながら架台なども含めた装置全体で、生産性向上を実現する
- 架台設計に労力やコストを掛けずに、ロボットの設置や装置設計の自由度を高める
省スペースで高速・高精度を実現するVRTは、
エプソンのロボットの性能を最大限に発揮し、製造ラインの生産性向上に寄与します。
技術の種別から探す
公式アカウント一覧Official Account