



力覚センサー
ロボットに人間の「感覚」を加える
力覚センサー
繊細な部品の組み立てや、狭い隙間に部品をはめ込むような精密な作業では、人の「感覚」に頼った微妙な力加減が必要になります。エプソンが得意とするセンシング技術の一つである水晶圧電方式を採用した力覚センサーは、人が精密な作業を行う際に欠かせない「感覚」をロボットに加える技術です。
ロボットに人間の感覚を加える
力覚センサー
(注)本サービスは、YouTube™のサービスを使って提供いたします。
(注)YouTubeは、Google Inc.の商標です。
力覚センサーは、x,y,z軸それぞれについて力の大きさと回転方向を検出できるセンサーです。ロボットと組み合わせて使用される力覚センサーには、次の三つの機能が求められます。
- 1. 高感度:測定方向に加えられた微小な力や回転方向を高感度に検出できること
- 2. 高剛性:力が加わっても変形しにくいこと(ロボットの精度に影響しないこと)
- 3. ユーザビリティ:力覚センサーで得た情報に基づき、ロボットを制御できること
力覚センサーをロボットに搭載して連携させることで、ロボットは微小な力の変化や回転方向を高感度で検出できるようになります。検出した力情報をもとにロボットを制御することで、人間が手先の感覚をもとに行っていた動作を、ロボットで行うことが可能になります。力覚センサーはロボットに人間の感覚を与え、複雑な作業の自動化の為には欠かせないデバイスといえます。
水晶圧電方式で
高感度・高剛性を実現
ロボットに搭載する力覚センサーには、微小な力を検出しつつロボットの精度にできるだけ影響しないことが求められます。従来の力覚センサーの多くは、ものを押したときに生じるセンサー内の部品の変形量(ひずみ)を計測しているものが多いため、弱い力でものを押し込んだときには、この変形量が小さくノイズに隠れてしまいます。一方、微小な力を検出しようとするとセンサー部品を変形しやすい構造にする必要があり、剛性が下がってしまいロボットの精度が低下してしまうという課題がありました。
エプソンは自社が得意とする水晶デバイスを力覚センサーに用いることにより、この高感度・高剛性という相反する特性を両立させました。水晶は単結晶の結晶体であり、圧力をかけると電気分極が起こり、水晶表面に電荷が発生する(圧電効果)性質があります。エプソンの力覚センサーには、この性質を活用した、水晶圧電方式が採用されています。これにより、少ない変形量(高剛性)で微小な力を検出(高感度)することができます。世界最大規模の水晶デバイスメーカーであるエプソンでは、自社の水晶に関する開発技術を活かして高精度の力覚センサーを開発しました。
このように、エプソンの力覚センサーは高剛性でありながら0.1[N]の微細な力から、最大の押し付け力である250[N]まで精度よく検出することができます。また、高剛性のためロボットの精度を損なわず力覚センサーの値を使ったロボット制御を行うことができ、ロボットには最適な力覚センサーだと言えます。
エプソンでは、自社製のスカラロボットや6軸ロボットに力覚センサーを搭載し、自社の工場で使用する中でブラッシュアップしてきました。力覚センサーを組み合わせることでロボットは「接触」「面合わせ」「探り」「倣い」「押し付け」といった精密な作業を実現できます。

- 接触:ワークが接触したことを検出する(閾値を超える力を検出したら停止)
- 面合わせ:ワークを対象物の面に合わせる(回転方向のトルクが0になるまで旋回)
- 探り:対象物上の穴や段差を見つける(指定された軌道を移動し、負荷がゼロの位置で停止)
- 倣い:部材面に沿って動かす(指定方向の力がゼロになるまで移動)
- 押し付け:ワークを所望の力で押し付ける(指定の力を押し付け、閾値を超える力を検出したら停止)
これらの基本動作を組み合わせながら、人間と同じ動作をさせることが可能になります。
例えば、「接触」「倣い」「押し付け」の動作を組み合わせることで、微小なネジの斜め方向に締め付けます。
また、「接触」「倣い」の動作により組み込む方向と位置を合わせます。さらに、「面合わせ」「押し付け」の動作により隙間が小さく噛みこみ面が斜めになっている歯車の組み込み作業ができます。
『Epson RC+』で産業用ロボットと
力覚センサーを統合した力覚制御
『Epson RC+』は、エプソンのロボットとセンシング技術を統合するソフトウエアです。『Epson RC+』上では、視覚的にわかりやすい操作で力覚センサーとロボットを接続し、連携させることが可能です。また、ロボットを制御するのと同じ開発環境で力覚センサーの情報を活用できるため、センサーとロボットの連携や開発環境の構築に時間をかけることなく、スムーズにアプリケーションの開発を行えます。
さらに、ロボットや力覚センサーの実機を使用しなくても、『Epson RC+』のシミュレーターを使ってロボットの動きや周囲との干渉などを確認することができます。そして、エプソンのロボットと組み合わせたダイレクトティーチング機能で、作業者は6軸ロボットの手先を直接持って動かしながら動き方を教えることも可能です。PC上だけでなく、現場でも動作を教えられるため、アプリケーションの開発を短期間で完了できます。

力覚センサーの活用で
製造業の課題を解決する
(注)本サービスは、YouTube™のサービスを使って提供いたします。
(注)YouTubeは、Google Inc.の商標です。
力覚センサーは、人間が手先の感覚で作業していた工程の多くを自動化し、さらに人間の感覚では判別できない微小な力・トルクの変化を定量化することできます。この結果、作業を行いながら異常を検出することで、後工程に不良を流さないこと、また、力・トルクを記録、監視することで装置(システム)を常に最良な状態に保つことが可能になります。
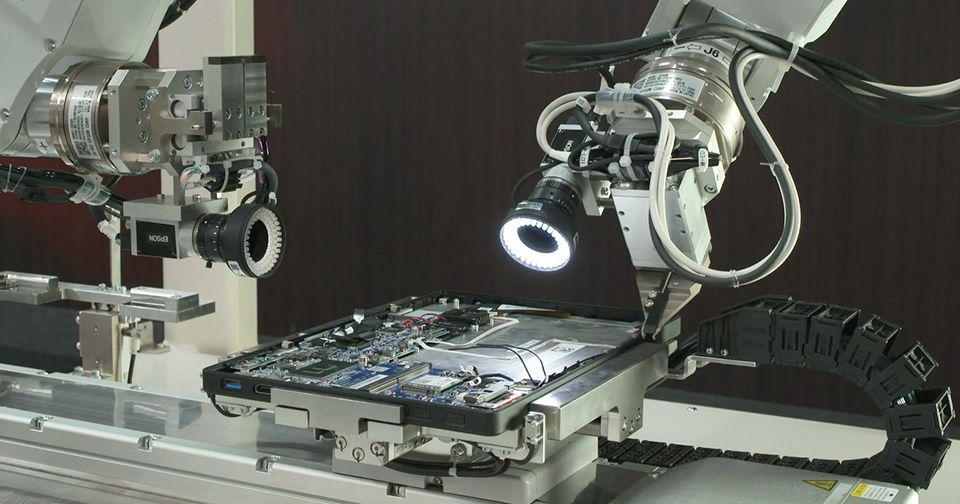
今まで人間にしかできなかった作業の自動化は、製造業が直面している、人手不足、技術継承といった、さまざまな課題に対する有効な解決策になります。また、ビジョンセンサーと力覚センサーを組み合わせることで人間の「目」に「手」が加わり、これまでロボットへの置き換えが困難であったフラットケーブルなど柔らかい線状物の挿入作業など、自動化できる工程をさらに広げることができました。
今後は、力覚センサーの技術で産業用ロボットの適用範囲を拡大し、従来では困難だった製造現場における高精度な作業の自動化を実現し、生産性向上に貢献します。
技術の種別から探す
公式アカウント一覧Official Account