



2009年6月 コンパクト6軸(垂直多関節型)ロボット C3シリーズ

| 構造 | 垂直多関節型(6自由度) |
| 最大動作領域 | 600mm(P点:J4、J5、J6中心) |
| サイクルタイム | 0.3秒台(1kg負荷時) |
| 最大動作範囲 | J1関節(旋回) ±170°(ストッパー無し±180°) J2関節(下腕振り) -160°、+65° J3関節(上腕振り) +225°、-51° J4関節(手首旋回) ±200° J5関節(手首振り) ±135° J6関節(手首回転) ±360° |
| 最大動作速度 | J1関節 450°/s、J2関節 450°/s、 J3関節 514°/s、J4関節 553°/s、 J5関節 553°/s、J6関節 720°/s |
| 許容慣性モーメント(GD2/4) | J4関節 0.15kg・m2、J5関節 0.15kg・m2、 J6関節 0.1kg・m2 |
| 繰り返し位置決め精度 | ±0.02mm |
| 可搬質量 | 定格1/最大3kg(5kg)※ |
| 本体重量 | 26kg |
※ 手首下向きなど、条件により可能
製品特長
C3シリーズは、高速と低振動を両立した独自のスマートモーションコントロール技術を継承する、エプソン初の内製6軸(垂直多関節型)ロボットで、小型部品の精密組み立てに最適な性能を追求しました。お客様のスペース生産性の向上に威力を発揮します。
- 速さと精度
・バランスの取れたクラスNo.1※1の速さと精度で生産効率向上に貢献
-標準サイクルタイム0.3秒台※2、繰り返し精度±0.02mm - スリムなボディー
・高いスペース効率
-ロボット体積が動作エリアの1/44
-小さなヒジ(第3関節可動部の出っ張り※3)が当社従来機PS3-AS00の1/2
-アーム幅従来比-42%
-周辺機器・壁・天井への干渉が少なく、コンパクトな装置作りが可能 - 器用な手首
・小さくて動作範囲が広い手首(第5関節)※4により、なめらかな動きで多方向からの作業が可能
・周囲への干渉も少なくハンドの設計自由度が向上 - 自由度の高い取り付け
・天井、壁、床、斜め取り付けが可能
・高いスペース効率と自由なレイアウトを実現
※1 発売当時、※2 1kg 負荷時、※3 関節中心から出っ張り先端までの半径(下図1 参照)、※4 下図2、3 参照

図1
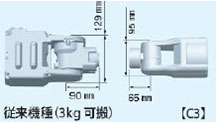
図2
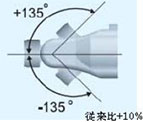
図3
誕生の背景
2002年頃より、組み立てなど複雑な作業をさせたいというお客様からの要求が増加してきましたが、その頃当社にはスカラロボット※5(以下スカラ)しかありませんでした。
お客様の要求に応えるには、より複雑な動きが可能な6軸ロボット(以下6軸)が必要であり、メカ部分をOEM供給で補うことで商品化していましたが、それではまだ不十分で、6軸の内製化が私たちのロボットビジネスで最大の目標となっていました。内製化するからには、当社の得意なスカラの強みを最大限に生かそうと、開発を始めました。
まずお客様を知ることから始め、調査により、当社のお客様は電気・電子産業分野が多く、動作領域※6が大きい700mm、900mmの6軸を無理しながら使っていることが分かりました。一般的に6軸はスカラに比べ動きが遅く、サイズも大きいので使いづらいのが現状でした。電気・電子産業分野のお客様は、動きが速くコンパクトな6軸を求めていたのです。他社が8Kg、6Kgの可搬重量を主力としていましたが、3Kgの可搬重量でよいということが分かったことも小型化に貢献しました。私たちは、エプソンのDNAである省・小・精をキーワードとした6軸を商品化すればお客様の要求に応えられると信じ、設計と営業が一体となって開発を進めました。
※5 水平方向にアームが動くロボット、※6 腕を最大限伸ばしたときの作業可能な領域
成果と反響
その後も続けた調査を通じ、お客様が求める製品を目指して「4つの商品コンセプト」※7を設定。このコンセプト設定が奏功し、開発と同時進行した営業活動でもお客様の反応は非常に良好で、お客様に受け入れられるという確信はさらに強いものとなりました。
スカラで培った当社の独自技術は、無事に6軸の開発に生かすことができ、試作機ではこれまでにない速い動きを実現できることが確認できました。
さらに、6軸専用にアームの先端を小型軽量化することで目標値を大きく上回る速い動き(図4)も実現、他社製品にはない高いスペース効率と自由なレイアウトが可能になりました(図5)。
それまで、速度の遅い6軸は、速度の速いスカラと生産ラインで共存しにくいとされてきましたが、C3ではその常識を打ち破ることができたのです。
※7 1.クラス最速のサイクルタイム、2.周辺との干渉領域極小化、3.器用な動作、4.高いスペース効率&自由なレイアウト
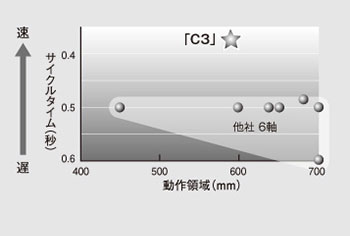
図4:速い動作
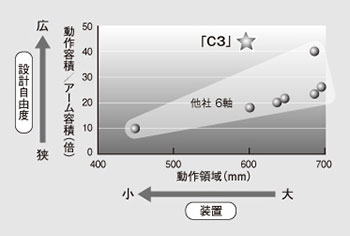
図5:高いスペース効率
公式アカウント一覧Official Account